In our daily lives, we often interact with the physical world, from the simple act of pressing a button to complex interactions with touchscreens. Force sensing resistors (FSRs) are crucial components that enable devices to 'feel' the pressure we apply. This article explores how these ubiquitous sensors function, their unique properties, and their broad applications, bridging the gap between physical interaction and electronic response.
A Force Sensing Resistor (FSR) is a passive, variable resistor whose resistance decreases with an increase in applied force, pressure, or mechanical stress. These piezoresistive sensors are fundamental components in various applications requiring force or pressure measurement. Their change in resistance provides an electrical signal proportional to the applied mechanical force, making them versatile in detecting the magnitude of applied force.
Force sensing resistors (FSRs) operate based on the principle of piezoresistivity, where a material's electrical resistance changes in response to applied mechanical stress. This phenomenon is central to the sensor's ability to detect force or pressure. When pressure is applied, the internal structure of the FSR is compressed leading to a reduction in electrical resistance, making it a valuable technology for measuring force in various applications.
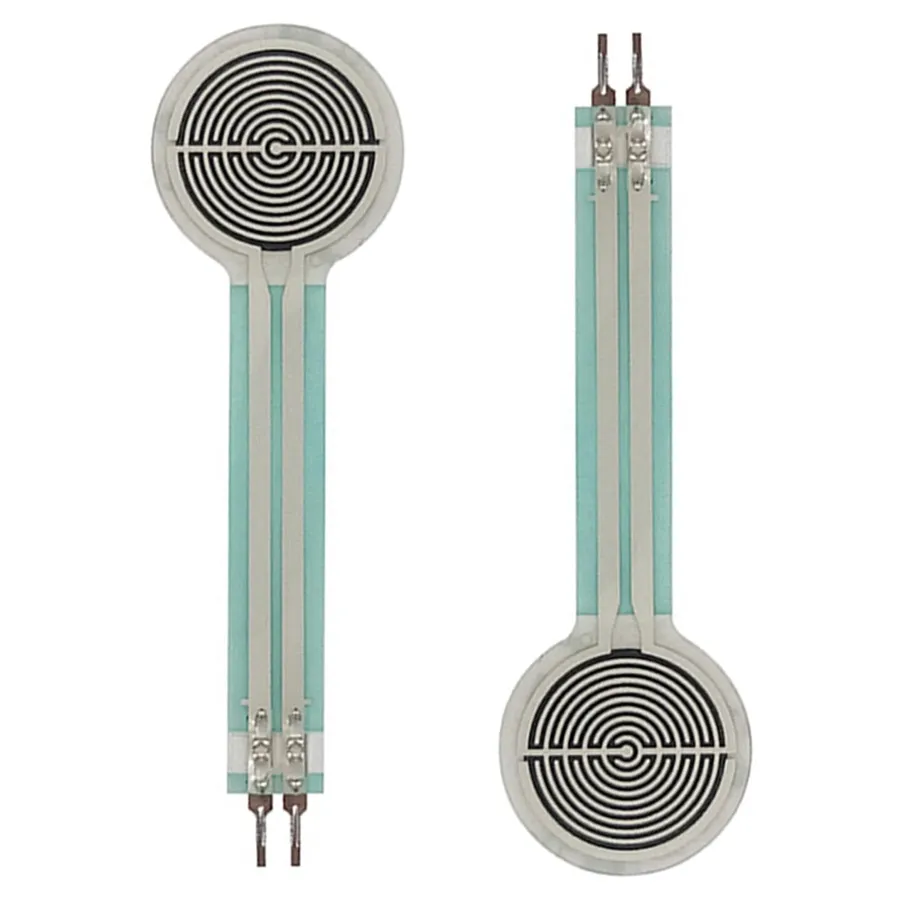
A typical FSR is constructed from several layers, each with a specific function. The key components include:
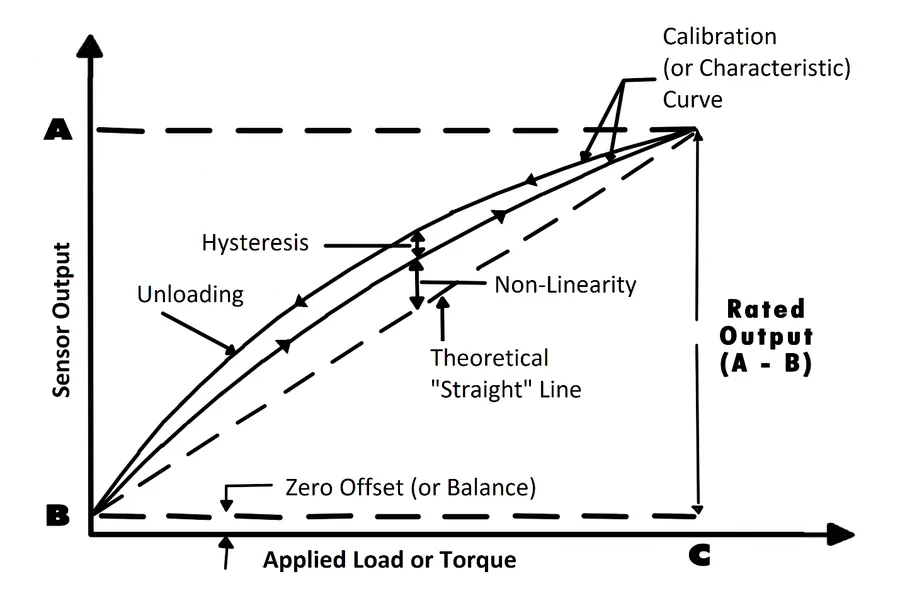
When force is applied, the piezoresistive material is compressed, bringing the conductive particles closer together. This increases the number of conductive paths and lowers the overall electrical resistance of the sensor. This effect is typically non-linear, meaning that the change in resistance is not directly proportional to the applied force.
The relationship between applied force and resistance is a crucial aspect of FSR operation and can be approximately described as an inverse relationship: as force increases, the electrical resistance decreases. However, this relationship is not entirely linear and will be characterized by a calibration curve that is specific to each individual sensor.
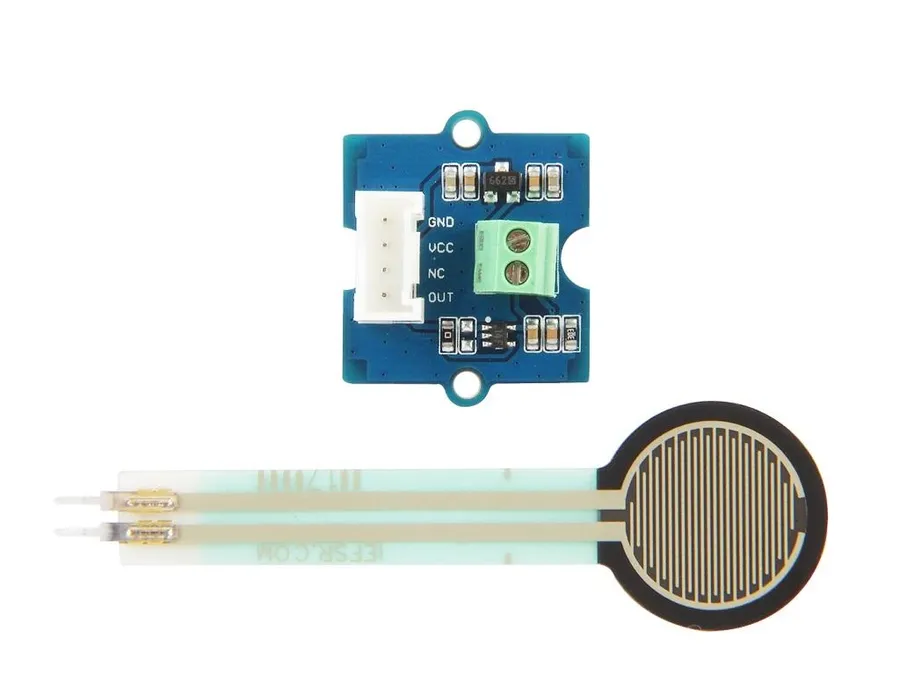
Force sensing resistors (FSRs) are available in a variety of shapes, sizes, and material compositions, each influencing their performance characteristics. These variations allow for diverse applications, where different sensitivities, resistance ranges, and form factors are necessary. Understanding these characteristics is critical for selecting the appropriate FSR for a given task.
| Characteristic | Description | Typical Values | Impact on Performance |
|---|---|---|---|
| Shape | Common shapes include round, square, rectangular, and custom designs. | Varies widely | Affects the area of force application and mounting options. |
| Size | Refers to the sensor's dimensions (e.g., diameter or length/width). | From a few mm to several cm | Determines the sensing area and spatial resolution. |
| Material Composition | Typically consists of conductive polymer or ink printed on a substrate. | Proprietary and varies by manufacturer | Influences sensitivity, linearity, and durability. |
| Sensitivity | The change in resistance per unit of applied force. | Typically measured in ohms/gram | Higher sensitivity means greater change in resistance for the same applied force. |
| Resistance Range | The range of resistance values when force is applied, typically high when no force is applied. | Varies widely depending on model | Affects the input impedance and measurement resolution and dynamic range. |
| Response Range | The range of force/pressure the sensor can effectively measure. | From grams to kilograms | Determines the range of measurable forces |
| Performance Parameters | Includes linearity, hysteresis, repeatability and temperature coefficient. | Varies widely | Impacts the accuracy and reliability of measurements. |
For example, round FSRs are frequently used in buttons, while square FSRs are useful for touchpads. Smaller FSRs provide greater spatial resolution, allowing them to more precisely measure a particular spot, but are typically less sensitive, whereas larger FSRs can detect a wider area but are less precise and more prone to positional variance. Material composition plays a significant role in defining the sensor’s sensitivity and operating range, which can vary widely based on the manufacturer and specific design requirements. Understanding these various shapes, sizes and material properties is necessary for engineers and designers to select the correct FSR for their intended application.

Force sensing resistors (FSRs) offer a compelling balance of simplicity and functionality for various force and pressure sensing applications; however, like all technologies, they possess both advantages and limitations that must be carefully considered during the design process. FSRs are particularly appealing due to their low cost, ease of integration, and thin, flexible form factor. Understanding both their strengths and weaknesses is critical for successful implementation.
| Feature | Advantages | Disadvantages |
|---|---|---|
| Cost | Low cost, making them suitable for budget-constrained projects and mass production. | N/A |
| Ease of Use | Simple integration into electronic circuits without complex circuitry or signal conditioning. | Calibration often required to achieve accurate measurements. |
| Form Factor | Thin profile and flexibility allow for easy integration into tight spaces and curved surfaces. | Can be more susceptible to damage from excessive force or physical deformation. |
| Sensitivity | Suitable for applications requiring a wide range of pressure detection. Reasonable sensitivity for many common applications. | Generally lower accuracy compared to more complex sensors like strain gauges or load cells. Accuracy can be affected by temperature. |
| Durability | Robust and capable of withstanding many force applications. | Prone to drift over time, particularly under continuous or high loads. They can also be sensitive to temperature changes. |
| Power Consumption | Low power consumption makes them ideal for battery-powered applications. | N/A |

Force sensing resistors (FSRs), with their ability to convert applied force into a measurable change in resistance, have become ubiquitous in a wide array of applications. Their versatility and low-profile nature make them ideal for integration into diverse devices, enhancing user interaction and enabling new functionalities.
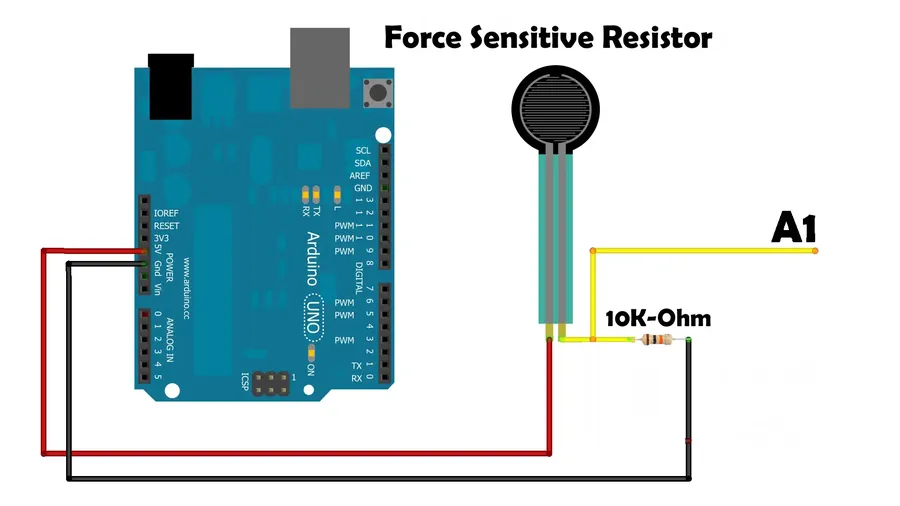
Integrating Force Sensing Resistors (FSRs) into electronic circuits is straightforward, making them accessible for various applications, particularly with microcontrollers like Arduino. This section will guide you through the necessary steps, from basic connection to calibration for accurate pressure measurement.
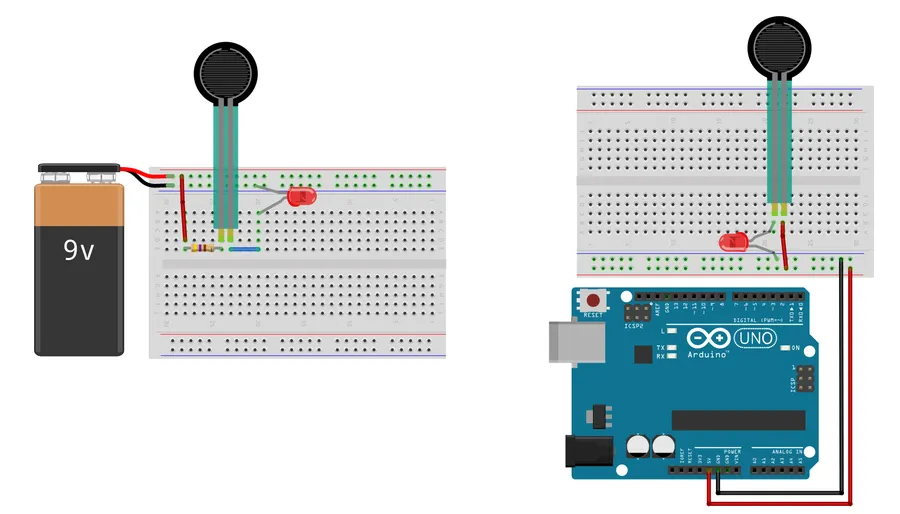
At the heart of FSR integration is the understanding of their variable resistance. As force is applied, the resistance decreases. To utilize this, a voltage divider circuit is typically implemented.
The FSR is placed in series with a known, fixed resistor, and the voltage across this fixed resistor is measured. This voltage varies with the FSR resistance, which depends on the applied force. This voltage is then read by the microcontroller's analog-to-digital converter (ADC).
| Component | Description | Considerations |
|---|---|---|
| FSR | Force Sensing Resistor, variable resistance depending on applied force | Select a size and sensitivity appropriate for the application. Consider the force range needed. |
| Fixed Resistor | A fixed value resistor to create a voltage divider | Value chosen based on expected FSR resistance range. Typically 1kΩ to 10kΩ. Smaller values = better sensitivity at higher pressure ranges; Larger value = better sensitivity at low pressure ranges. |
| Microcontroller (e.g., Arduino) | To read the analog voltage from the voltage divider and process it | Use the ADC for analog voltage readings, Ensure sufficient power is provided. |
| Connecting wires | For connecting components | Keep connections secure to avoid signal issues. Ensure wires are rated for the current. |
A simplified schematic involves connecting one FSR terminal to VCC, the other FSR terminal to one end of the fixed resistor, and the other end of the fixed resistor to GND. The junction between the FSR and the fixed resistor is connected to an ADC pin on the microcontroller. The output voltage of the FSR and fixed resistor node is the voltage read by the microcontroller.
To convert the analog reading into a force or pressure measurement, calibration is required. This involves recording ADC readings for known forces. The data is then used to create a mapping function that allows you to convert the voltage reading to force. Simple linear and more complex polynomial fitting are often used. Temperature compensation might be necessary for accurate measurement in varying environmental conditions.
// Arduino code example
const int fsrPin = A0; // Analog pin for FSR
const int fixedResistorValue = 10000; // Fixed resistor in ohms
void setup() {
Serial.begin(9600);
}
void loop() {
int sensorValue = analogRead(fsrPin);
float voltage = sensorValue * (5.0 / 1023.0); // 5V reference
// convert voltage to resistance
float fsrResistance = fixedResistorValue * ((5.0/voltage) - 1);
Serial.print("Sensor Value: ");
Serial.print(sensorValue);
Serial.print(", Voltage: ");
Serial.print(voltage);
Serial.print(", FSR Resistance: ");
Serial.println(fsrResistance);
delay(100);
}
Force sensing resistors (FSRs), strain gauges, and load cells are all used to measure force, but they operate on different principles and exhibit distinct performance characteristics. Understanding these differences is crucial for selecting the appropriate sensor for a specific application. FSRs are often chosen for their simplicity and low cost, while strain gauges and load cells are preferred when higher precision and accuracy are required.
| Feature | Force Sensing Resistor (FSR) | Strain Gauge | Load Cell |
|---|---|---|---|
| Working Principle | Piezoresistivity (resistance change due to pressure) | Change in electrical resistance due to strain (deformation) | Deformation of a mechanical structure measured by strain gauges |
| Accuracy | Lower | Medium to High | High |
| Cost | Low | Medium | High |
| Complexity | Simple integration into circuits | More complex requiring Wheatstone bridge and amplification | More complex, often requiring signal conditioning circuitry. |
| Sensitivity | Moderate | High | High |
| Durability | Moderate, susceptible to wear | High | High |
| Temperature Sensitivity | More sensitive to temperature changes | Less sensitive to temperature changes than FSR | Generally robust against temperature changes if properly compensated |
| Typical Applications | Touchpads, buttons, low-force applications | Precision measurements, weight scales, aerospace | Industrial weighing, high-force applications |
This section addresses common queries regarding Force Sensing Resistors (FSRs), providing concise answers to enhance understanding and practical application of these sensors.
Force sensing resistors have become indispensable in modern technology due to their simplicity and versatility. From consumer electronics to industrial automation, FSRs enable intuitive interactions and precise measurements. Understanding their basic principles and limitations is essential for anyone working with sensors or designing electronic devices, as they serve as a fundamental bridge between the physical world and our technological creations. The continued advancements in FSR technology will undoubtedly expand their applications and impact on how we interact with the world around us.