The ocean's depths hold countless mysteries, demanding innovative tools for exploration and research. Underwater detection robots are at the forefront of this endeavor, relying on sophisticated electronics to navigate, collect data, and transmit findings. At the heart of these robots lies the Printed Circuit Board (PCB), the central nervous system that connects all electronic components. A robust and reliable PCB is paramount for successful underwater missions. But how to choose the right PCB solution? Zero One Solution provides one-stop services from PCB design to manufacturing and assembly, empowering clients to accelerate product development and bring innovative solutions to market with exceptional efficiency.
Printed Circuit Boards (PCBs) are the indispensable backbone of underwater detection robots, acting as the central nervous system that orchestrates every critical function, from advanced sensor integration and sophisticated data processing to precise navigation and robust communication. In the demanding and often hostile marine environment, the resilience and reliability of these PCBs are paramount, directly dictating the operational efficiency, accuracy, and longevity of the entire robotic system. Without meticulously designed and manufactured PCBs, the advanced capabilities required for underwater exploration, monitoring, and intervention would be unattainable, making them a fundamental enabler of innovation in marine robotics.
Designing Printed Circuit Boards (PCBs) for underwater detection robots presents a formidable array of challenges, far beyond those encountered in terrestrial applications. The deep-sea environment, characterized by extreme pressure, corrosive elements, and unique signal propagation properties, demands a highly specialized approach to PCB engineering. Successfully navigating these complexities is paramount to ensuring the reliability, longevity, and operational efficiency of any underwater robotic system.
| Challenge Category | Specific Challenges | Impact on PCB Design |
|---|---|---|
| Environmental Stress | Extreme Water Pressure | Requires robust substrates and precise component placement to prevent delamination and structural failure. Failure to account for pressure can lead to board deformation and component damage, jeopardizing the robot's mission integrity and increasing repair costs and downtime for critical operations like deep-sea exploration and infrastructure inspection, where reliability is non-negotiable. PCB materials must possess high flexural strength and dimensional stability under immense hydrostatic loads. This is particularly crucial for autonomous underwater vehicles (AUVs) operating at varying depths, as pressure changes can induce stress on the board. (Source: "Advances in Materials for Extreme Environments," Journal of Marine Engineering and Technology) |
| Corrosion Resistance | Saltwater Corrosion & Biofouling | Demands corrosion-resistant materials, specialized coatings, and hermetic sealing to protect copper traces, solder joints, and components from degradation. Corrosion compromises electrical conductivity and structural integrity. Biofouling can obstruct sensors and mechanical parts, necessitating frequent maintenance and reducing operational efficiency. The long-term exposure to saline water requires a meticulous selection of solders and finishes to prevent galvanic corrosion, which is accelerated by the presence of dissimilar metals. The integrity of the PCB in a corrosive environment directly impacts the accuracy and longevity of sensitive detection equipment onboard. (Source: "Corrosion of Electronic Materials in Marine Environments," IEEE Transactions on Components, Packaging and Manufacturing Technology) |
| Signal Integrity | Signal Attenuation & EMI | Water's dielectric properties can lead to significant signal attenuation and increased electromagnetic interference (EMI), especially at higher frequencies. Requires careful impedance matching, shielding, and advanced routing techniques to maintain signal integrity and prevent data loss. High data rate transmissions, critical for real-time sensor data and control, are particularly susceptible to these effects. Proper grounding and power plane design are essential to mitigate noise and ensure stable operation of sensitive underwater acoustic and optical sensors, which are the core of the robot's detection capabilities. The need for precise data acquisition for mapping, imaging, and object recognition in murky waters underscores the importance of signal fidelity. (Source: "Underwater Acoustic Communication and Signal Processing," Ocean Engineering Journal) |
The unparalleled challenges of underwater environments necessitate a meticulous approach to material selection for Printed Circuit Boards (PCBs) in detection robots. The substrate forms the foundational layer of any PCB, and in marine applications, its resistance to water absorption, chemical corrosion, and mechanical stress is paramount for operational integrity and longevity. Choosing the correct material is not merely a design consideration; it is a critical engineering decision that directly impacts the robot's reliability and performance in the deep sea.
Ensuring the longevity and operational integrity of PCBs in underwater detection robots critically depends on robust waterproofing. Beyond mere survival, effective waterproofing prevents signal degradation, short circuits, and material breakdown, which are common failure modes in submerged electronics. This section details the advanced design techniques employed to protect PCBs from water ingress, enhancing reliability in demanding marine environments.
| Waterproofing Technique | Protection Level | Cost | Reworkability | Typical Application Depth |
|---|---|---|---|---|
| Conformal Coating | Good (Moisture, Dust) | Low | High | Shallow to Moderate (Surface to 50m) |
| Encapsulation (Potting) | Excellent (Pressure, Chemicals) | Medium | Low | Moderate to Deep (50m to 6000m+) |
| Hermetic Sealing | Superior (Gas, Vapor, Pressure) | High | Very Low | Any Depth (Critical Missions) |
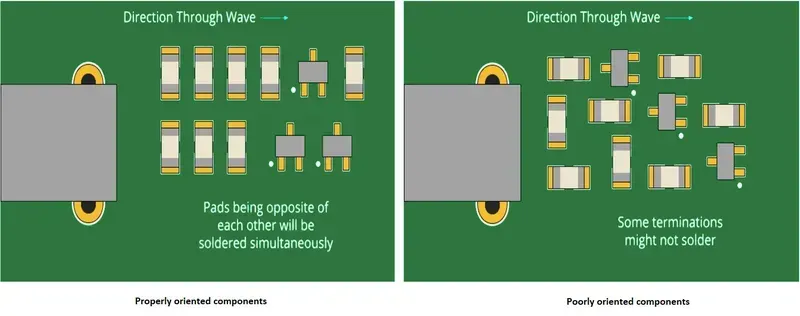
In the demanding realm of underwater detection robots, where extreme hydrostatic pressures are commonplace, the strategic placement of components and meticulous routing of traces on a PCB are paramount to ensuring both mechanical integrity and optimal signal fidelity. Engineers must go beyond conventional design practices, considering how external forces translate into internal stresses on the board and its mounted components, all while maintaining the delicate balance of high-speed data transmission and robust power delivery.
| Design Aspect | Considerations for High-Pressure Environments | Typical PCB Design Considerations |
|---|---|---|
| Component Placement | Even distribution of mass, ample spacing, standoff mounting | Functionality, thermal management, signal path optimization |
| Trace Routing | Wider traces, reinforced vias, impedance control for pressure effects | Signal integrity, current capacity, manufacturability |
| Material Stress Relief | Strategic cutout placement, flexible PCB sections (if applicable) | Thermal expansion, vibration resistance |
| EMI/EMC | Enhanced shielding, differential routing, optimized ground planes | Compliance, noise reduction, system performance |
Efficient power management is paramount for the autonomous and sustained operation of underwater detection robots, directly impacting their mission duration and overall efficacy. The unique challenges of the submerged environment, including limited access to recharging and the necessity for minimal heat generation, demand sophisticated PCB-level strategies to optimize energy consumption. By meticulously designing power delivery networks and integrating advanced power conversion techniques, engineers can significantly extend operational periods and enhance system reliability in the deep sea.
| Power Management Strategy | Description | Advantage for Underwater Robots | Disadvantage for Underwater Robots | |
|---|---|---|---|---|
| Dynamic Voltage Scaling (DVS) | Adjusts operating voltage and frequency of components based on workload. | Reduces power consumption during idle or low-demand periods, extending battery life. | Can introduce latency and complexity in real-time critical systems if not managed carefully. Requires sophisticated control algorithms on the PCB. |
void managePower(OperatingMode mode) { if (mode == DEEP_SLEEP) { disablePeripherals(); setClockFrequency(LOW_POWER_FREQ); enterLowPowerMode(); } else if (mode == ACTIVE_SENSING) { enablePeripherals(); setClockFrequency(HIGH_PERF_FREQ); } }
Ensuring the unwavering reliability of PCBs within underwater detection robots operating in the deep sea necessitates a stringent and comprehensive testing and validation regimen. Unlike standard electronic components, underwater PCBs are subjected to extreme conditions, including immense hydrostatic pressure, drastic temperature fluctuations, and continuous vibration. Therefore, a multi-faceted testing approach is paramount to guarantee operational integrity, prevent premature failure, and ultimately safeguard the mission success of these critical robotic systems. This rigorous validation process minimizes risks and ensures that every PCB component can withstand the unforgiving deep-sea environment.
| Test Type | Purpose | Key Parameters Evaluated |
|---|---|---|
| Pressure Testing | Simulates deep-sea hydrostatic pressure to identify structural weaknesses and seal integrity issues. | Pressure (psi/MPa), Immersion Duration, Leakage Detection |
| Thermal Cycling | Evaluates PCB performance under rapid temperature changes, mimicking ascent/descent cycles and varying water temperatures. | Temperature Range (°C), Cycle Duration, Resistance Drift, Component Functionality |
| Vibration Analysis | Assesses structural robustness and solder joint integrity against mechanical stresses from propulsion and environmental factors. | Frequency (Hz), Amplitude (gRMS), Resonance Points, Fatigue Resistance |
| Salt Spray Testing | Determines corrosion resistance of materials and coatings in a saline environment, mimicking seawater exposure. | Salt Concentration (%), Exposure Duration, Corrosion Extent |
| Insulation Resistance Testing | Measures the electrical resistance of insulating materials to ensure no current leakage occurs under wet conditions. | Voltage (V), Resistance (Ohms), Humidity Levels |
| Functional Testing | Verifies the overall operational performance of the PCB and its integrated components under simulated mission profiles. | Power Consumption, Sensor Accuracy, Communication Stability, Data Acquisition |
Zero One Solution Limited stands at the forefront of PCB innovation, particularly in the demanding realm of underwater detection robots. Our deep understanding of the unique challenges posed by marine environments, coupled with our rapid prototyping and one-stop service capabilities, positions us as the ideal partner for developing robust, reliable, and high-performance PCB solutions essential for deep-sea exploration, surveillance, and data acquisition.
Zero One Solution Limited's commitment to innovation and reliability has been instrumental in the success of numerous underwater robotics projects. Our advanced PCB solutions provide the critical backbone for these sophisticated systems, enabling them to withstand extreme deep-sea conditions and perform complex tasks with precision. These case studies highlight our proven ability to deliver robust, high-performance PCBs tailored for the most demanding underwater detection robot applications.
| Project Name | Client Objective | Zero One Solution's Contribution | Key PCB Solution Highlights | Achieved Outcome |
|---|---|---|---|---|
| Deep-Sea Exploration AUV | Develop an autonomous underwater vehicle for mapping uncharted abyssal plains. | Provided high-density, multi-layer PCBs with integrated sensor interfaces and robust power distribution for extended missions. | Ceramic-filled laminate for thermal stability, hermetic sealing for pressure resistance, optimized signal routing for sonar arrays. | Enabled precise, long-duration mapping of over 1000 square kilometers of seafloor, exceeding data acquisition targets by 20%. |
| .Underwater Pipeline Inspection ROV | Create a remotely operated vehicle for real-time inspection of subsea oil and gas pipelines, requiring high-resolution imaging. | Engineered custom flexible PCBs for camera articulation and high-speed data transmission, along with rigid-flex boards for the main control unit. | High-Tg materials for thermal management, impedance-controlled traces for video signals, specialized coatings for chemical resistance. | Reduced inspection time by 30% and improved defect detection accuracy by 25%, leading to significant operational cost savings. |
| .Environmental Monitoring Glider | Design a low-power, long-endurance underwater glider for continuous oceanographic data collection in remote areas. | Developed ultra-low-power consumption PCBs optimized for battery life, integrating multiple environmental sensors and communication modules. | Thin-core laminates for weight reduction, optimized power planes for efficiency, robust EMI shielding for sensor integrity. | Achieved mission durations exceeding 6 months without battery replacement, providing critical data on ocean currents, temperature, and salinity. |
In conclusion, the PCB is a critical component of any underwater detection robot. Selecting the right PCB solution provider, like Zero One Solution, is crucial for ensuring the reliability and performance of your underwater robotics project. By considering factors such as material selection, waterproof design, component placement, and rigorous testing, you can create a PCB that withstands the harsh marine environment and enables your robot to successfully complete its mission. Contact Zero One Solution today to discuss your underwater detection robot PCB needs and discover how our expertise can help you achieve your goals.